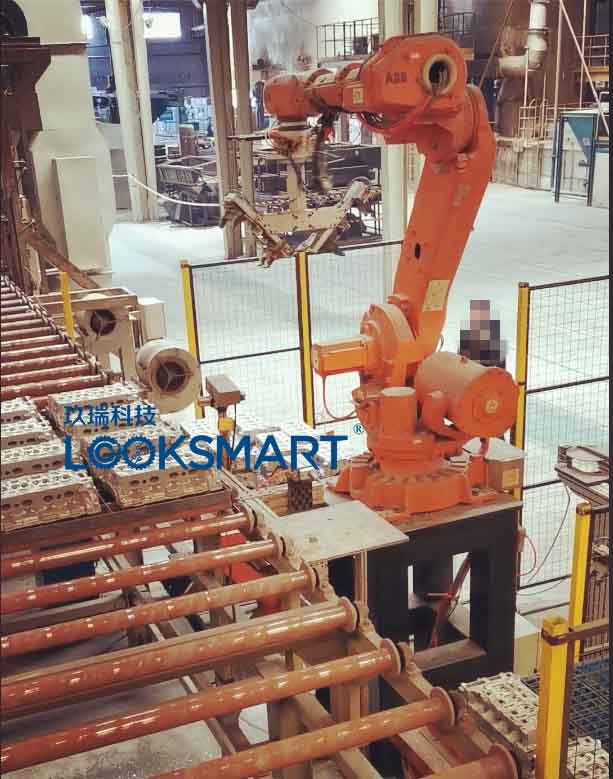
系統(tǒng)概述
汽車發(fā)動機(jī)缸蓋智能搬運系統(tǒng),,是采用玖瑞科技自研的機(jī)器視覺識別定位技術(shù)系統(tǒng)進(jìn)行識別和定位,,控制機(jī)器人模塊協(xié)同完成發(fā)動機(jī)缸蓋毛坯料及成品料在進(jìn)料棧板,、線體棧板及出料棧板之間的搬運工作,,輔之以上料二維碼讀取與識別,,下料氣動打標(biāo)工序,。該系統(tǒng)是機(jī)器視覺技術(shù)系統(tǒng)的典型應(yīng)用,。
l該系統(tǒng)可以實現(xiàn)三種功能模式:單上,、單下、邊上邊下模式。

視覺識別與定位
用戶現(xiàn)場需要視覺識別定位的兩種產(chǎn)品,,識別算法通過特征提取,,特征比對等工具對產(chǎn)品進(jìn)行識別以對應(yīng)不同夾具,兩種產(chǎn)品圖像如下:

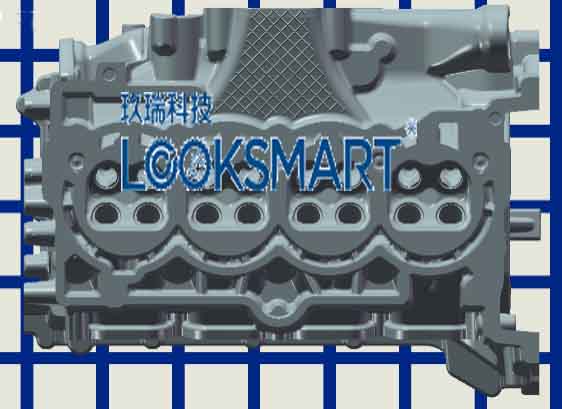
平面定位基本原理:通過視覺系統(tǒng)獲取發(fā)動機(jī)缸蓋上端面上的選定特征點相對于標(biāo)定位置在X向,、Y向及旋轉(zhuǎn)角度α的偏移量,,可以通過閾值分割或者模板匹配進(jìn)行偏移量的獲取。
l獲取模板圖像
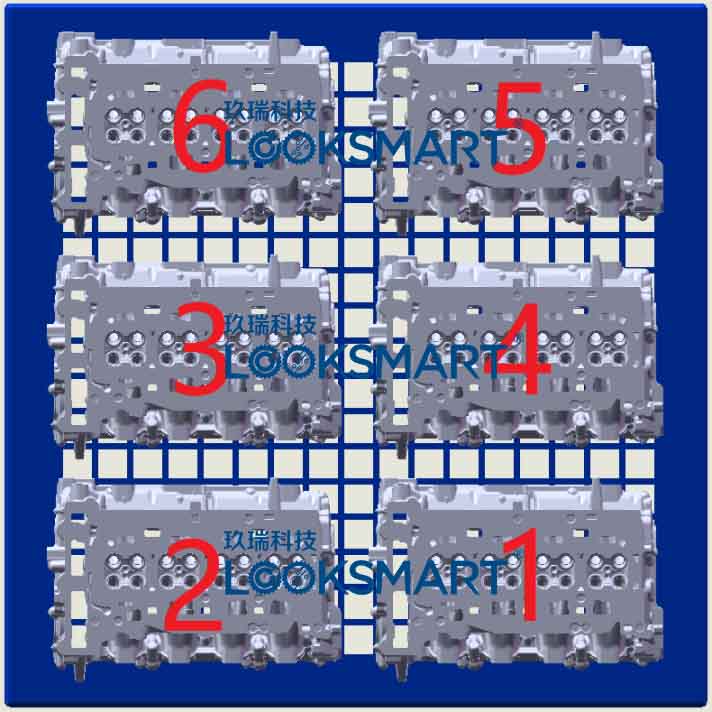
滿垛發(fā)動機(jī)缸蓋示意


機(jī)器人引導(dǎo)與控制
由于滿垛進(jìn)料棧板上的發(fā)動機(jī)缸蓋在水平面上無法精確定位碼放,,所以每次上料后棧板上的發(fā)動機(jī)缸蓋位置相對于機(jī)器人第一次程序調(diào)試時的位置在x向,、y向及角度上都存在一定偏差,視覺定位算法為機(jī)器人提供了發(fā)動機(jī)缸蓋相對標(biāo)定位置的偏移量,,機(jī)器人可以根據(jù)此偏移量調(diào)整發(fā)動機(jī)缸蓋的抓取坐標(biāo),。搬運識別定位系統(tǒng)集成了機(jī)器人控制、識別定位控制及線體控制三大控制模塊通過工業(yè)總線進(jìn)行系統(tǒng)通訊,,系統(tǒng)網(wǎng)絡(luò)布局圖詳見圖所示,。
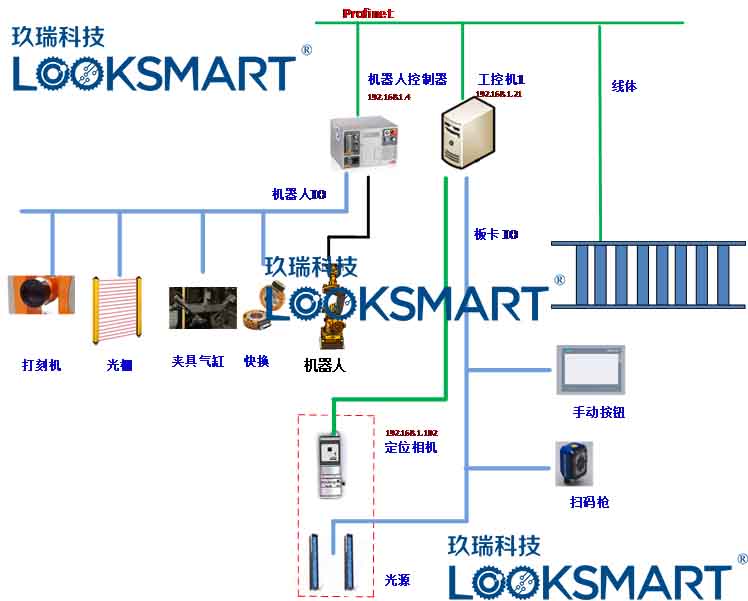
系統(tǒng)網(wǎng)絡(luò)布局圖
